

El robot de patrulla i detecció a l'aire lliure

Característiques
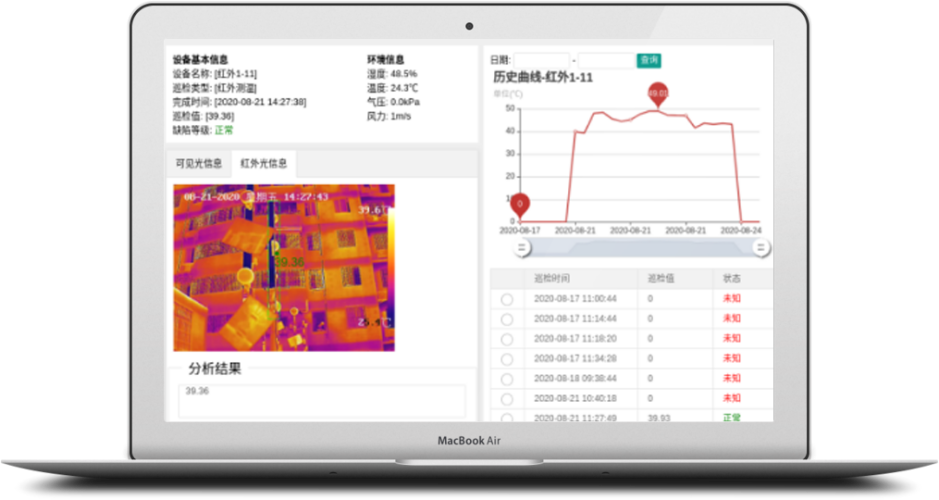
Implementeu automàticament les tasques d'inspecció de la patrulla a la subestació i registreu la informació d'estat de cada dispositiu.

Analitzar automàticament la informació de l'equip i l'alarma per a condicions anormals
Especificacions
| Dimensions | 722*458*960 (mm) |
| Pes | 78 kg |
| Potència de funcionament | 8h |
| En funcionament Condicions | Temperatura ambient: -10 °C a 60 °C/ambient humitat: <99%; Grau de protecció: IP55; operable en dies de pluja lleugera |
| Resolució de la llum visible Resolució infraroja | Zoom òptic de 1920 x 1080/30X |
| Mode de navegació | 640 x 480/Precisió>0,5°C |
| Mode de moviment | Navegació sense pistes LIDAR 3D, evitació automàtica d'obstacles |
| Velocitat màxima de conducció | Direcció en anar recte i marxar cap endavant; direcció al seu lloc; traducció, estacionament 1,2 m/s (Nota: velocitat màxima de conducció en mode remot) |
| Distància màxima d'aparcament | 0,5 m (Nota: distància de frenada màxima a 1 m/s de velocitat de moviment) |
| Sensor | Càmera de llum visible, imatge tèrmica d'infrarojos, dispositiu de recollida de soroll, dispositiu de detecció de temperatura i humitat distribuïda opcional i monitorització de descàrrega parcial AIS |
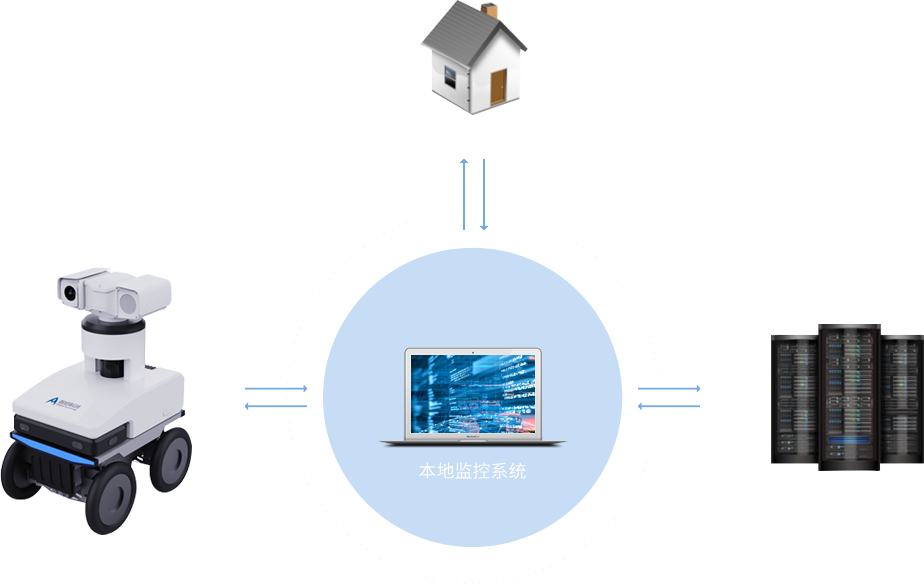
| Mode de control | Comandament totalment automàtic/remot control totalment automàtic/remot |
Escenaris aplicables

Casos d'aplicació
