

El robot de patrulla y detección al aire libre

Características
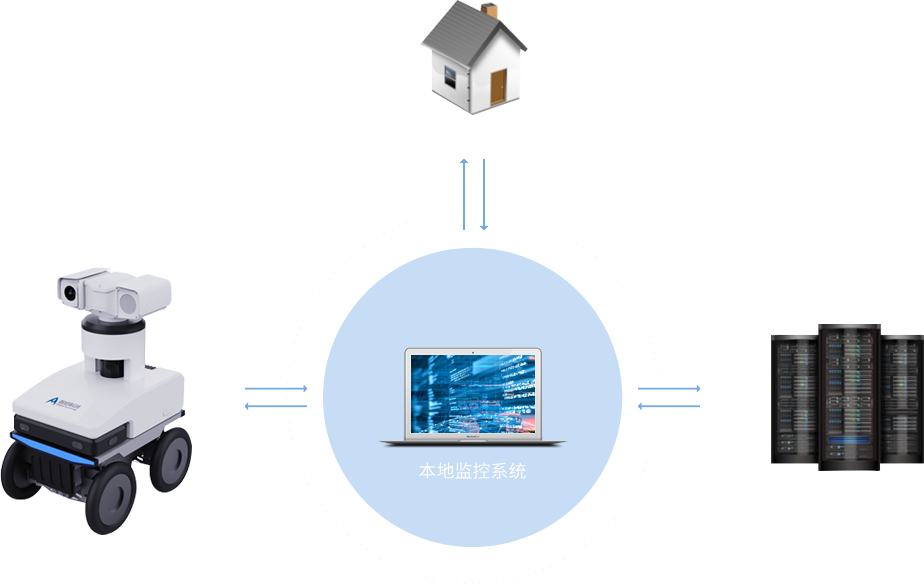
Implemente automáticamente tareas de inspección de patrulla en la subestación y registre la información de estado de cada dispositivo.

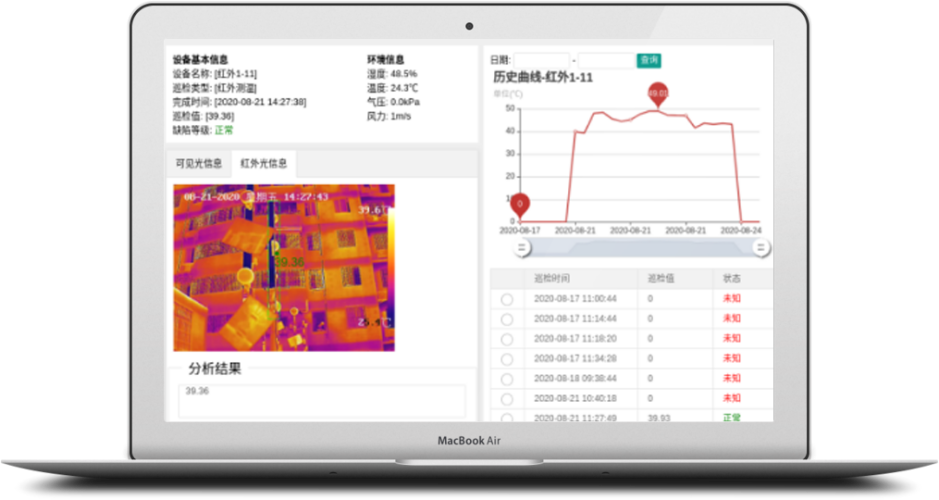
Analizar automáticamente la información del equipo y alarmar por condiciones anormales.
Presupuesto
| Dimensiones | 722*458*960 (milímetro) |
| Peso | 78 kilos |
| Potencia operativa | 8h |
| Operante Condiciones | Temperatura ambiente: -10°C a 60°C/Ambiente humedad: <99%; Grado de protección: IP55; operable en días de lluvia ligera |
| Resolución de luz visible Resolución infrarroja | Zoom óptico de 1920 x 1080/30X |
| Modo de navegación | 640 x 480/Precisión>0,5°C |
| Modo de movimiento | Navegación sin seguimiento LIDAR 3D, evitación automática de obstáculos |
| Velocidad máxima de conducción | Dirigir al ir recto y marchar hacia adelante; dirección en su lugar; traducción, estacionamiento 1,2 m/s (Nota: velocidad máxima de conducción en modo remoto) |
| Distancia máxima de estacionamiento | 0,5 m (Nota: distancia máxima de frenado a una velocidad de movimiento de 1 m/s) |
| Sensor | Cámara de luz visible, cámara termográfica infrarroja, dispositivo de recolección de ruido, dispositivo opcional de detección distribuida de temperatura y humedad y monitoreo de descarga parcial AIS |
| Modo de control | Control remoto/completamente automático Control remoto/completamente automático |
Escenarios aplicables

Casos de aplicación
