Роботи тиҷоратии тозакунанда-2
Чангкунаки ҳамгирошуда, шустушӯй ва тозакунӣ ва табдили басомадҳои оқилона: ба кори дилгиркунанда бо тела додани чанг ва шустани фарш тавассути щӯткаҳои печонидашуда не бигӯед; ҳисси оқилонаи доғҳои фарш; танзими автоматии ҳаҷми об ва қувваи ҷуброн; тозакунии оддии партовҳои хушк ва тар; ва партовҳои сахт ва моеъро ҷудо карданд.
Тозакунии худкор, стандартӣ, дақиқ ва идорашаванда бо ҳар як гӯшаи пӯшида

Сенарияҳои татбиқ
Мушаххасоти техникӣ


Принсипҳои кор
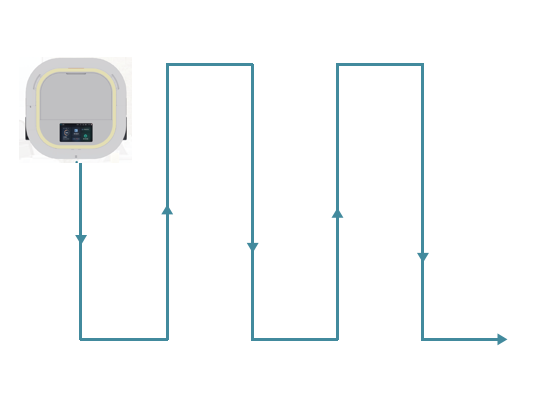
Принсипҳои тозакунӣ
Роҳи тозакунии навъи камон
(Барои тозакунӣ: 440 мм, суръати тозакунӣ: 0,2-0,8 м/с, режимҳои танзимшаванда)
Чангкунаки ҳамгирошуда, шустушӯй ва тозакунӣ ва табдили басомадҳои оқилона: ба кори дилгиркунанда бо тела додани чанг ва шустани фарш тавассути щӯткаҳои печонидашуда не бигӯед; ҳисси оқилонаи доғҳои фарш; танзими автоматии ҳаҷми об ва қувваи ҷуброн; тозакунии оддии партовҳои хушк ва тар; ва партовҳои сахт ва моеъро ҷудо карданд.
Тозакунии худкор, стандартӣ, дақиқ ва идорашаванда бо ҳар як гӯшаи пӯшида.
Ролики 440 мм аз нахи карбон азхудкунии обҳои махсус ва баланд молекулавӣ сохта шудааст, дорои танзими автоматии фишор барои ошкор кардани ахлот мебошад. лой дар якпаҳлӯ хасу лой мобайнӣ барқарор карда мешавад; оби равон фаршро дар вақти воқеӣ тоза мекунад ва зарар намерасонад; фавран ҳамчун шуста хушк кунед;
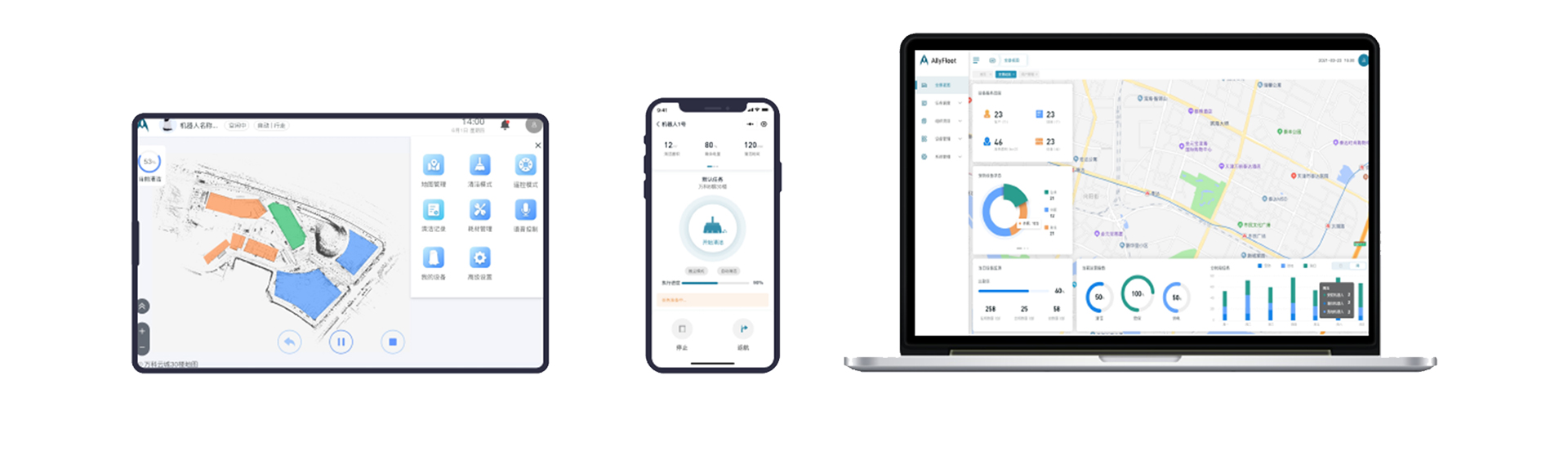
Ҷойгиршавӣ, сатҳи батарея, миқдори оби тоза ва канализатсия ва фарогирии тозакунӣ дар замина дар вақти воқеӣ нишон дода мешаванд. Маҳлули самараноки тозакунӣ пас аз ҳисоб ва таҳлили оқилонаи суръати тозакунӣ, миқдори об, самаранокии тозакунӣ ва талафоти моддӣ таъмин карда мешавад.
Ҷойгиркунии системаҳои дугона ва ҳамкории бисёрҷониба
Барномаи мобилӣ + фиристодани дурдаст амалиётро содда ва чандир мегардонад. Ҳама функсияҳои замимаи мобилӣ бо маҷмӯи назорати фармони овозӣ, фаврии овозӣ дар вақти воқеӣ, барориши фаврии супориш дар экрани сенсорӣ ва намоиши ҳолати воқеӣ дар вақти воқеӣ идора карда мешаванд. Система дастрасии бисёр роботҳо ба абр, ҳамоҳангсозӣ ва мубодилаи маълумот дар вақти воқеӣ, мониторинг ва ҳушдор, фиристодани вазифаҳои дурдаст ва конфигуратсияи таҷҳизот ва навсозии онлайнро дар бар мегирад, то якчанд роботҳоро барои кори зуд бо хароҷоти камтари вақт ва зуд ҳамоҳанг созанд. вокуниш ба истифода ва нигоҳдорӣ.