Söwda arassalaýjy robot-2
Toplumlaýyn vakuum, kesmek we arassalamak we ýygylygy akylly öwürmek: tozan basmak we pollary ýuwmak bilen ýadaw işe ýok diýiň; pol tegmillerini akylly duýmak; suwuň göwrümini we sorujy güýjüni awtomatiki sazlamak; gury we çygly hapalary ýönekeý arassalamak; we gaty we suwuk hapalary bölýär.
Her burç bilen örtülen awtomatiki, standart, takyk we dolandyrylýan arassalamak

Programma ssenarileri
Tehniki spesifikasiýa


Iş ýörelgeleri
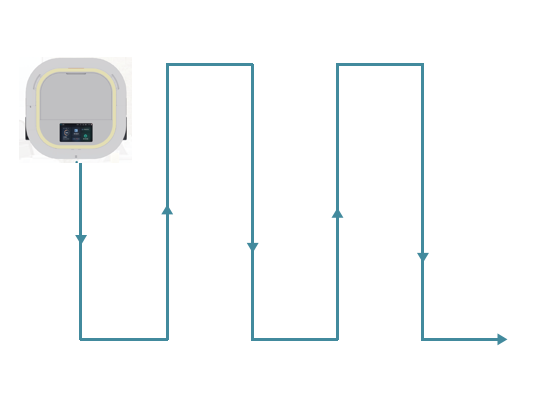
Arassalamak ýörelgeleri
Aý görnüşli arassalaýyş ugry
(Arassalaýyş ini: 440 mm, arassalama tizligi: 0,2-0,8m / s, sazlap boljak reesimler)
Toplumlaýyn vakuum, kesmek we arassalamak we ýygylygy akylly öwürmek: tozan basmak we pollary ýuwmak bilen ýadaw işe ýok diýiň; pol tegmillerini akylly duýmak; suwuň göwrümini we sorujy güýjüni awtomatiki sazlamak; gury we çygly hapalary ýönekeý arassalamak; we gaty we suwuk hapalary bölýär.
Her burç bilen örtülen awtomatiki, standart, takyk we dolandyrylýan arassalamak.
Specialörite we ýokary molekulaly suw siňdiriş uglerod süýüminden ýasalan 440 mm giňlikdäki rolikde, zibili akyl taýdan kesgitlemek üçin awtomatiki basyş sazlamasy bar. Çotga hapalanan hapalar derrew dikeldilýär; akýan suw poly wagtynda arassalaýar we hiç hili zyýan bermeýär; kesmek ýaly derrew guradyň;
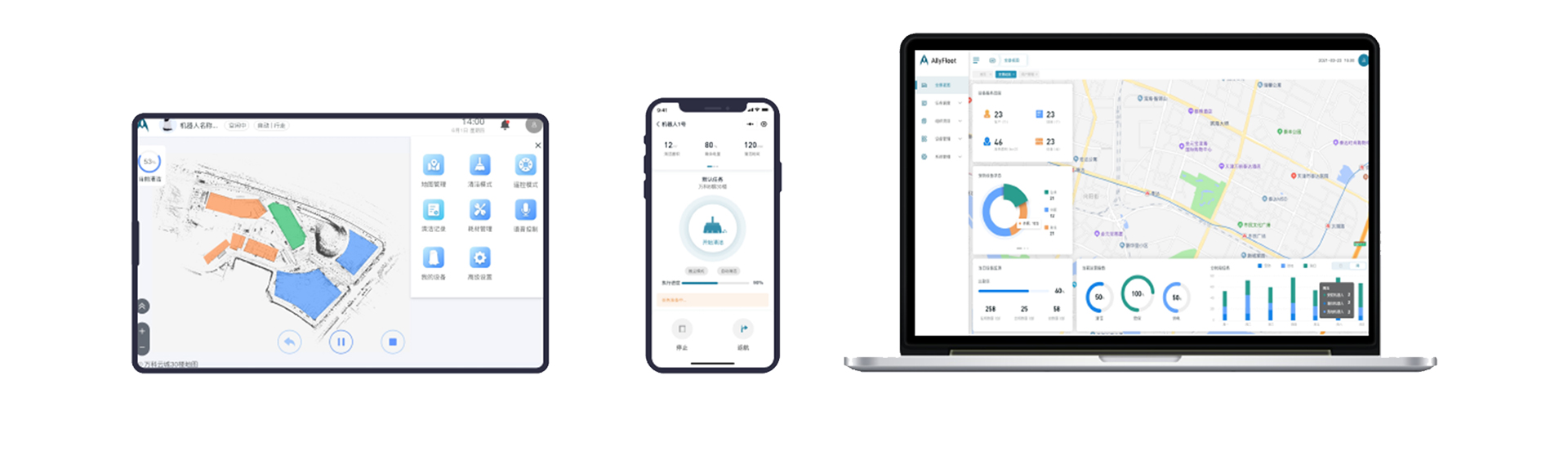
Locationerleşýän ýeri, batareýanyň derejesi, arassalaýjy suw we lagym mukdary we arassalaýyş örtügi fonda hakyky wagtda görkezilýär. Netijeli arassalaýyş çözgüdi, arassalama tizligini, suwuň mukdaryny, arassalaýyş netijeliligini we maddy ýitgileri akylly hasaplamakdan we seljermekden soň berilýär.
Iki ulgamly ýerleşdiriş we köp re modeimli täsir
Jübi programmasy + uzakdan ibermek amaly ýönekeý we çeýe edýär. Mobilehli ykjam programma funksiýalary ses buýrugyny dolandyrmagyň, real wagt ses isleginiň, duýgur ekranda meseläniň çalt çykarylmagynyň we real wagt ýagdaýynyň görkezilmegi bilen dolandyrylýar. Ulgamda buluda köp robotly giriş, real wagt maglumatlary sinhronlamak we paýlaşmak, akylly gözegçilik we duýduryş, uzakdan iberilýän iberiş we enjam konfigurasiýasy we onlaýn täzelenme bar, şonuň üçin birnäçe robot az wagt we çalt işlemek üçin utgaşdyrylyp bilner. işlemek we hyzmat etmek.