Söwda arassalaýjy robot
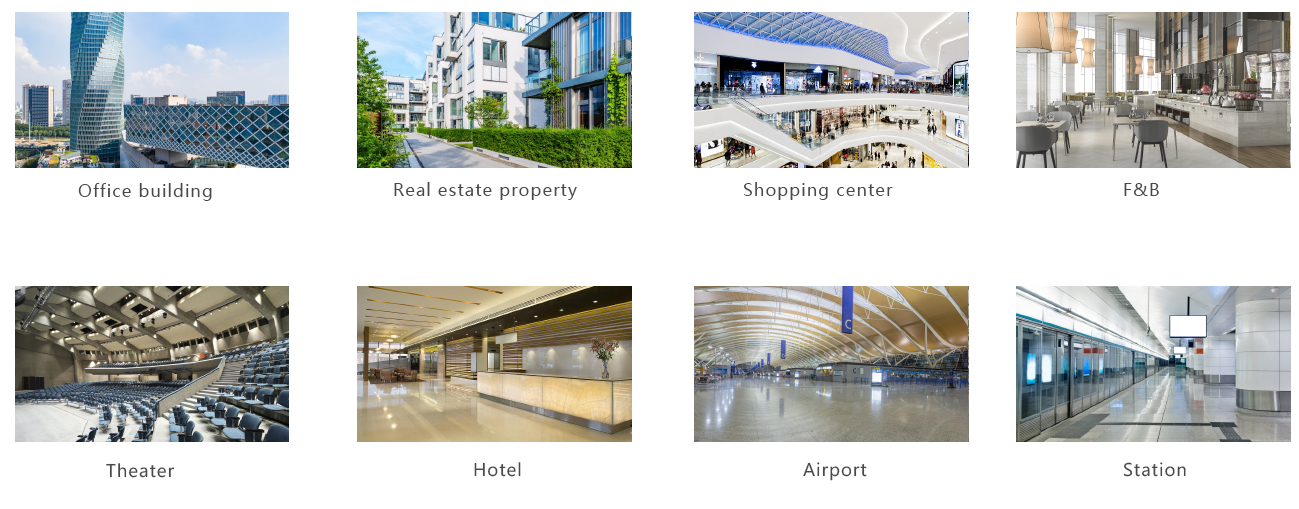
Bu täjirçilik arassalaýjy robot poly ýuwmagy, wakuum etmegi we tozany basmagy birleşdirýär we 24/7 garaşsyz zarýad bermäge, öz-özüni arassalamaga, zeýkeşlere, doly aýratynlykly stansiýa bilen suw doldurmaga mümkinçilik berýär. Keselhanalarda, söwda merkezlerinde, uniwersitet şäherçelerinde, sergi zallarynda, ofis binalarynda, terminallarda we beýleki ýerlerde giňden ulanylyp bilner.

Programma ssenarileri
Tehniki spesifikasiýa

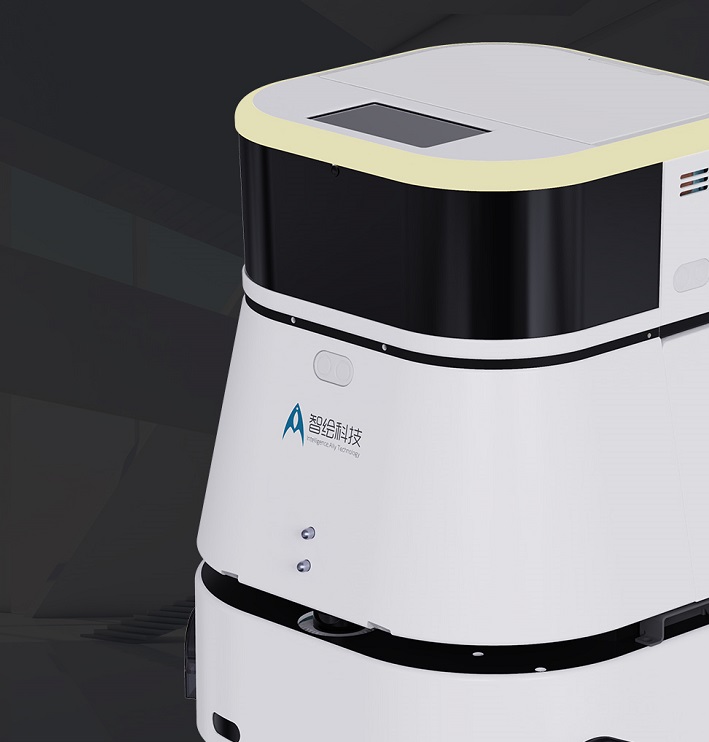
Önümiň tanyşdyrylyşy
Bu täjirçilik arassalaýjy robot poly ýuwmagy, wakuum etmegi we tozany basmagy birleşdirýär we 24/7 garaşsyz zarýad bermäge, öz-özüni arassalamaga, zeýkeşlere, doly aýratynlykly stansiýa bilen suw doldurmaga mümkinçilik berýär. Keselhanalarda, söwda merkezlerinde, uniwersitet şäherçelerinde, sergi zallarynda, ofis binalarynda, terminallarda we beýleki ýerlerde giňden ulanylyp bilner.
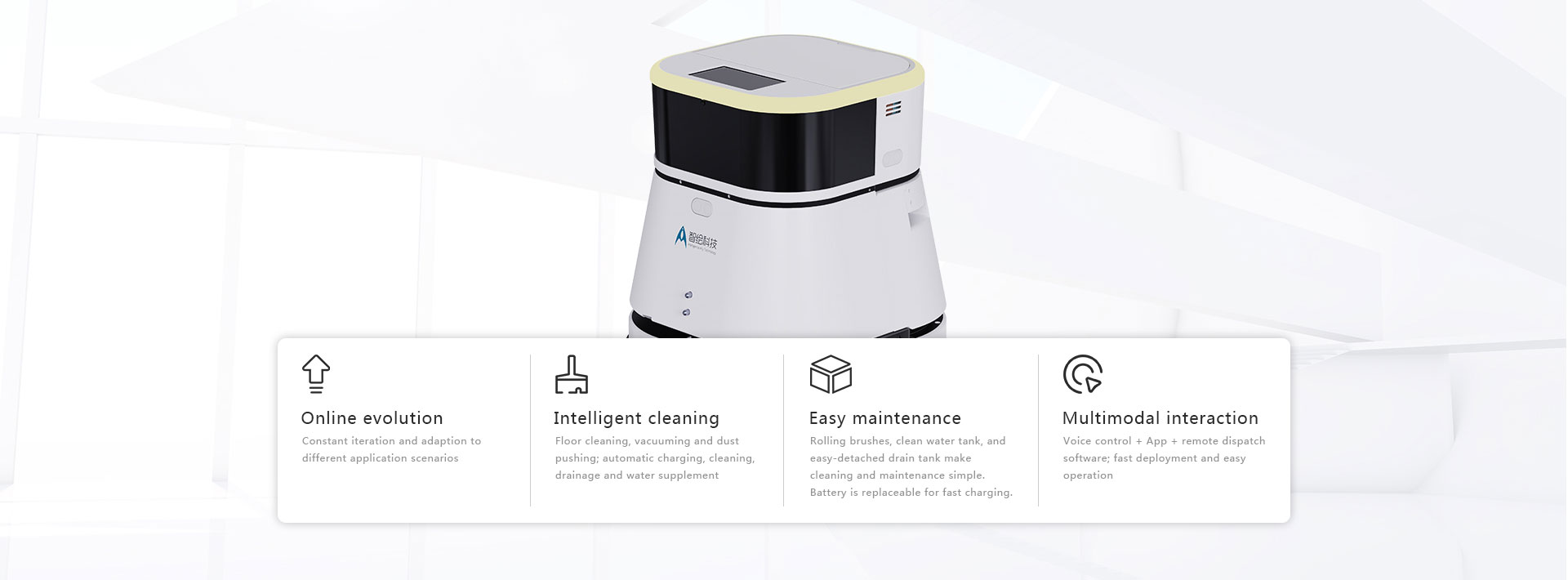
Önümiň funksiýasy
Wagty + birleşdirilen arassalamak
Arassalaýyş wagty, sebitara kombinasiýa we akylly iberiş bilen hakyky pilotsyz amal
Sebitara amal
Custöriteleşdirilen we awtomatiki liftde münmek, pollaryň üstünden üznüksiz arassalamak
Awtomatiki nawigasiýa we päsgelçiliklerden gaça durmak
Köp sensorly awtomatiki nawigasiýa, sürüjisiz derejedäki duýgurlyk we päsgelçiliklerden gaça durmak, has ýokary howpsuzlyk we ygtybarlylyk üçin köp çaknyşma we damja garşy gorag ulgamlary
Ses dolandyryşy, ekrana degmek we programma arkaly köp maksatly täsir
Ses buýrugy dolandyryşy we real wagt ses sesi, duýgur ekranda meseläniň çalt çykmagy we ykjam programma hemme zady gözegçilikde saklaýar
Akylly ýygylygy öwürmek
Arassalaýyş güýjüni menek esasynda awtomatiki sazlamak; tozany, bölejikleri we agyr hapalaýjylary aňsat arassalamak
Akylly ssenariýa meýilnamasy
Awtomatiki kartalaşdyrmak we gaýtalamak, ugry meýilleşdirmek, real wagt gurşawy we çylşyrymly ssenariýalara çeýe jogap
Öz-özüňi arassalamak
Akylly menek tapmak, el bilen sökmezden we arassalamazdan doly arassalamak
Toplumlaýyn vakuum, kesmek we arassalamak
Dryönekeý tozan basmak we pol ýuwmak, gury we çygly zibilleri yzygiderli arassalamazlyk we gaty we suwuk hapalary aýyrmak üçin çotgalar bilen ýuwmak.
Awtomatiki zarýad bermek we nokadyň täzelenmegi
Pes batareýa derejesinde awtomatiki zarýad bermek, nokadyň täzelenmegi bilen doly we üznüksiz arassalamak
Uzakdan akylly dolandyryş
Akylly bulut gözegçiligi we aladalandyryjy, uzakdan iberilýän iberiş, maglumatlary hakyky wagtda geçirmek, enjamlaryň konfigurasiýasy we onlaýn täzelenme

Aýratynlyklary
Köp sensorly birleşme, pilotsyz derejeli nawigasiýa we ýerleşdiriş Içerde we daşarda päsgelçiliksiz we çeýe giriş we sebitler boýunça köp meseleler Aladasyz wagtlaýyn bronlamak we awtomatiki arassalamak Gurak we çygly arassalamak üçin ygtybarly sanly we çotgasyz motor reesimler Easyeňil suw çüýşesi, arassalaýyş moduly we batareýa işlemek we tehniki hyzmat etmek, uly sahnalar üçin amatly 1 lazer kartasy 1 KW.h magazineurnal görnüşi we çalt zarýad berilýän batareýa Pes batareýada awtomatiki zarýad bermek; aralyk nokadynyň täzelenmegi Ulanyjynyň rugsady barlamak we şahsyýetnamany dolandyrmak Bejeriş, näsaz işlemek we sarp edip boljak çalyşmak üçin akylly haýyş
Aňsat hyzmat etmek
Çalt bölmek:
Öňe çekiş görnüşli arassa suw çüýşesi arassa suwy çalt doldurýar. Hapa suwlary ýönekeý arassalamak we arassalamak üçin ýokarky gapakdan aýryp bolýar. Magazineurnal görnüşli dizaýn, batareýany pes derejede çalyşmagy aňsatlaşdyrýar. Çekiş görnüşli modul tehniki hyzmaty we arassalamagy aňsatlaşdyrýar

Önümçilik aýratynlyklary
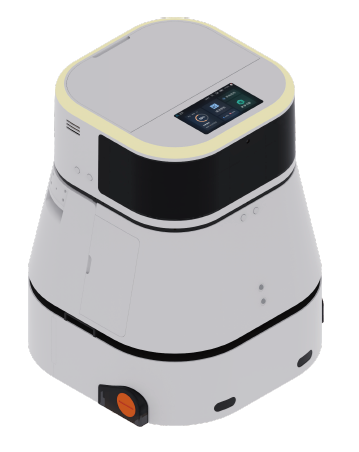
| Ölçegleri | 500 × 504 × 629 mm |
| Agram | 35 kg |
| Sensor konfigurasiýasy | 3D Lidar, 2D päsgelçiliklerden gaça durmak radary, Lidar çyzygy, ultrases we damja garşy |
| Nawigasiýa ulgamy | 3D sensorly lazer + görüş ulgamy + IMU + milimetri birleşdirýän köp sensorly birleşme nawigasiýasy |
| Päsgelçiliklerden gaça durmak ulgamy | 3D köp setirli lazer + 2D bir setirli lazer + reňkli kamera + çyzyk Lidar + ultrases + damja garşy datçik |
| Sürüjiniň tizligi | 0,2 ~ 0.8m / s, sazlap boljak reesimler |
| Arassa suw / lagym kuwwaty | 10L / 10L |
| Arassalamak ini | 440 mm |
| Çotga basyşy | 20 ~ 80N, 4 reesim |
| Iş tertibi | Wagtlaýyn arassalamak, bir gezek basmak çalt arassalamak we el bilen arassalamak |
| Operationeke iş meýdany | Gaty arassalamak 1600m2 / tozan 3000m2 / tozan 6000m2 |
| Batareýa | Lityum demir fosfat 1kw.h (Çalyşyp boljak magazineurnal görnüşi) |
| Zarýad berilýän batareýanyň ömri | 2 sagadyň dowamynda doly zarýad bermek; Kuwwatlylygy 2,5-6 sagat |
| Ekrany görkeziň | 7 dýuým |
| Tor aragatnaşygy | 4G / 5G / Wi-Fi |
| Dolandyryş programma üpjünçiligi | Ses dolandyryşy / ykjam programma / bulut programma üpjünçiligi |
Ulanylýan ssenariýler